
Balayage laser terrestre
Technique d’acquisition rapide et automatique de données tridimensionnelles utilisant la lumière laser pour mesurer directement, sans contact avec l’objet et des surfaces depuis une position terrestre.
Les anglicismes “scanning” ou “scan” sont à éviter, ceux-ci étant utilisés parfois sans distinction pour désigner “le nuage”, “l’action de scanner” ou encore “la station d’acquisition”. Il reste toutefois assez
cohérent d’employer le terme « scan » pour désigner le résultat de ce qui a été scanné, c’est-à-dire le nuage (voir définition de“scan” ci-dessous).
Bruit du nuage
Caractérise la dispersion des points autour d’une surface. Il s’explique par plusieurs facteurs affectant
la mesure de distance (imprécision inhérente au système de mesure, facteurs environnementaux, matériaux de surface, couleur de la surface, angle d’incidence du faisceau, etc.)
Il est détectable en analysant l’épaisseur du nuage obtenu après avoir scanné une surface plane et claire. Le bruit du nuage peut être réduit en appliquant un processus de correction et/
ou de suppression de bruit. On peut également appeler bruit du nuage, tout point faux et indésirable.
Cadence de mesure
La cadence de mesure se définit par
une fréquence (kHz ou MHz) et se traduit par un nombre de mesures de distances effectuées en une seconde. On parle plus couramment du nombre de points par seconde.
Champ de vision
(ou “FOV, field of view” en anglais)
Le champ de vision global d’un scanner est l’intervalle angulaire dans le plan horizontal et/ou vertical dans lequel un scanner laser terrestre est capable de scanner. Le scanner “panoramique” permet de relever l’environnement complet autour de la station, tandis que le scanner “caméra” est limité à des
champs de vision plus restreints. Entre les deux se situe le scanner panoramique à champ vertical limité.
Densité
La densité de points se réfère au nombre de points acquis par unité de surface à distance d’objet fixe. Elle est conditionnée par le choix du pas défini pour effectuer le balayage (espacement entre points) et de la distance objet-scanner.
Effet de bord
Lorsque le faisceau rencontre un coin, une partie est réfléchie tandis que l’autre poursuit son chemin jusqu’à rencontrer un obstacle et être renvoyé. Ainsi apparaissent des points “fantômes”, artefacts à proximité des bords des objets scannés (Boehler at al., 2003). Par ailleurs, comme seule une partie de la distribution (supposée gaussienne à la transmission) revient au scanner, la position du centre du point,
calculée à partir de cette distribution sera biaisée (Lerma et Garcia, 2008).
Empreinte laser
(en anglais “spot”)
Représente la taille du faisceau laser au niveau de la surface de l’objet à numériser.
Équation LiDAR
Similaire à l’équation RADAR (Radio Detection and Ranging). Elle relie la puissance du rayonnement émis PE à la puissance du rayonnement détecté (reçu) PD . Le temps écoulé entre l’émission et la réception de l’onde fournira la distance séparant le scanner de l’objet (Pfeifer et al. (2015)).
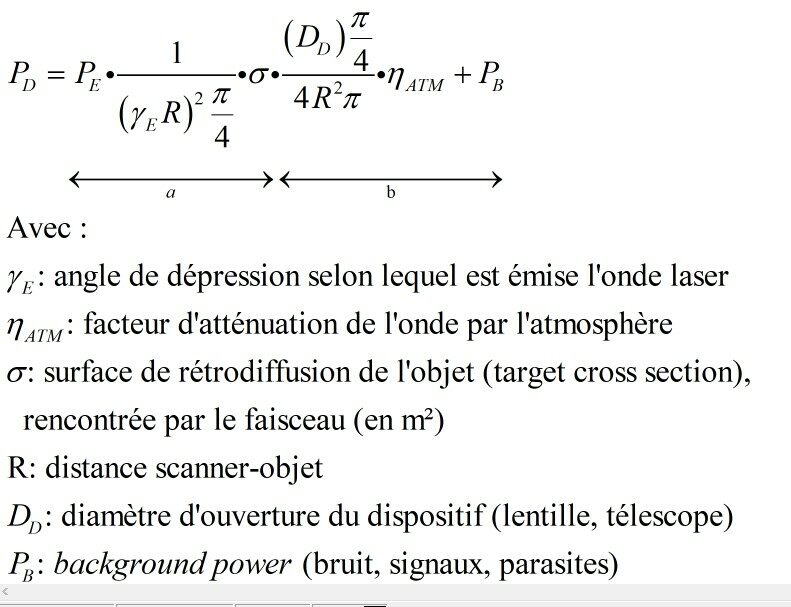
Le signal laser est émis et traverse l’atmosphère avant d’impacter
l’objet, qui le rétrodiffuse vers le système d’acquisition, en
retraversant ainsi l’atmosphère.
(a) Puissance émise de façon directionnelle vers la cible surfacique
(b) Rapport de la surface de l’ouverture du dispositif d’émission à la surface du rétrodiffuseur omnidirectionnel (supposé lambertien) à une distance R.
Erreurs environnementales
Les facteurs environnementaux affectent la propagation du signal dans l’atmosphère. On peut citer la température ambiante, la pression, l’humidité relative, qui affectent l’indice de réfraction du milieu traversé par l’onde. On peut citer également l’éclairage des lieux, les vibrations du sol accueillant le scanner. L’effet de ces facteurs n’est pas toujours négligeable. Par exemple, les mesures de
distances effectuées la nuit sont moins bruitées que celles de jour, en raison du rôle perturbateur que joue la lumière ambiante (composante spectrale identique à celle de l’onde laser).
Erreurs méthodologiques
L’opération de balayage laser
terrestre est dotée d’un niveau d’automatisme assez élevé
comparé aux mesures tachéométriques, où l’opérateur est
définitivement le guide de la mesure. Une fois le scanner en
place et calé, son intervention peut se résumer au choix de
paramètres, tels que la fenêtre d’acquisition, la “qualité” (critère
lié au nombre de tirs par points), et bien entendu le choix du
pas du scannage, qui devra toutefois être cohérent par rapport
au niveau de détail souhaité (éviter le sur-échantillonnage tout
comme le sous-échantillonnage). Par conséquent, l’erreur
provenant des manipulations de l’opérateur est réduite au
niveau de l’acquisition. Des erreurs peuvent davantage surgir
lors de la phase de géoréférencement des nuages de points
et bien entendu dans la phase d’extraction d’information. Ces
problèmes seront abordés dans la partie “traitement de nuage
de points”.
Intensité laser
L’intensité laser retournée par l’objet et mesurée au niveau du scanner représente la quantité de
lumière reçue après réflexion sur la surface du rayonnement laser incident (codée généralement entre 0 et 255 ou entre 0 et 1). Comme détaillé dans (Soudarissanane et al., 2007), cette intensité est fonction de l’angle d’incidence du rayon, de la distance objet-scanner, de la réflectance de l’objet (albédo)–qui est différente suivant la longueur d’onde employée par le laser – et de la puissance émise. L’atténuation du signal par l’atmosphère entre également en ligne de compte. L’intensité de l’onde réfléchie donnera des indications sur la nature des objets imagés.
Laser
Le terme LASER, de l’anglais “Light Amplification by Stimulated Emission of Radiation” est une source de lumière cohérente (…) qui produit une amplification de lumière par émission stimulée de rayonnements. Une source laser occupe généralement une bande spectrale très fine.
LiDAR
Le terme LiDAR, de l’anglais “Light Detection and Ranging” « , signifie la détection et la télémétrie par la lumière. Un capteur ou système LiDAR est un système actif, qui enregistre l’énergie renvoyée par l’objet après l’avoir éclairé artificiellement. Le temps de trajet émetteur – objet – récepteur
mis par l’onde cohérente permet de déduire la distance séparant l’objet de l’émetteur. D’autre part, l’intensité de l’onde réfléchie donnera des indications sur la nature des objets imagés.
Nuage de points
(en anglais “point cloud”)
Ensemble de points acquis (par mesure lasergrammétrique, par exemple) ou calculés (par technique photogrammétrique, par exemple), à la surface d’un objet, en vue de le représenter en 3D..
Ombre laser
Partie de l’objet masquée par un obstacle situé entre le scanner et l’objet. Le faisceau laser ne peut pas
atteindre la surface ainsi occultée, ce qui génère des ombres laser dans le nuage de points. Il sera préférable d’employer le terme “ombre laser” plutôt que “trou” dans le nuage de points.
Pas (de balayage)
Le “pas” est l’espacement entre points successifs choisi par l’utilisateur avant de lancer le balayage
laser. Il est un multiple de la résolution spatiale. Le balayage laser s’effectue selon une trame spécifique à définir au moment de l’acquisition. L’utilisateur fixe le pas angulaire vertical et horizontal de son choix (généralement identique dans les deux plans). Le plus petit pas angulaire disponible est appelé résolution angulaire. On veillera à ne pas confondre “résolution spatiale” et “pas de balayage”. La résolution spatiale est une limite en-deçà de laquelle le scanner ne peut plus distinguer 2 objets voisins. Le “ pas” est l’espacement entre points successifs choisi par l’utilisateur avant de lancer le balayage laser.
Portée
Distance minimale (et maximale) à laquelle le scanner doit (ou peut) se situer par rapport à l’objet, pour fournir des observations fiables.
Résolution angulaire d’un scanner laser
Grandeur qui caractérise la capacité de l’appareil à mesurer de façon indépendante deux objets situés sur des lignes de visées adjacentes.
Résolution en distance
Plus petite variation de distance mesurable
Résolution spatiale d’un scanner laser
La résolution spatiale théorique d’un scanner laser terrestre représente le pas le plus fin que le scanner laser est capable de mesurer, à une distance objet-scanner fixe (produit de la résolution angulaire (rad) et de la portée). La résolution spatiale effective est liée à la résolution angulaire du scanner et à la taille de l’empreinte laser sur l’objet. On veillera à ne pas confondre “résolution
spatiale” et “pas de balayage”. La résolution spatiale est une limite en-deçà de laquelle le scanner ne peut plus distinguer 2 objets voisins. Le “pas” est l’espacement entre points successifs
choisi par l’utilisateur avant de lancer le balayage laser.
Résolution spatiale théorique ou effective
La résolution spatiale théorique d’un scanner laser terrestre représente le pas le plus fin que le scanner laser est capable de mesurer, à une distance objet-scanner fixe (produit de la résolution angulaire (rad) et de la portée). La résolution spatiale effective est liée à la résolution angulaire du scanner et à la taille de l’empreinte laser sur l’objet. Il faut veiller à choisir un pas angulaire cohérent par rapport à la taille de l’empreinte laser, afin d’éviter le phénomène de sur-échantillonnage du nuage.
RVB
Sigle désignant les valeurs RVB (Rouge, Vert, Bleu). Les valeurs RVB associées à chaque point du nuage sont extraites d’une image numérique acquise sur l’objet scanné à partir d’une caméra numérique, le plus souvent intégrée à l’appareil.
“Scan”
Terme employé pour désigner le produit fourni par le scanner, c’est-à-dire le nuage de points. Cet anglicisme ainsi que “scanning” sont toutefois à éviter, ceux-ci désignant souvent sans distinction le nuage, l’action de scanner, ou encore la station d’acquisition.
Scanner caméra
(en anglais « camera scanner »)
Scanner effectuant les mesures de distances et d’angles dans un champ de vision particulièrement étroit aussi bien dans le plan horizontal que dans le plan vertical. Le champ angulaire couvert
est de l’ordre de 40°x40°. Le nom « scanner caméra » provient du champ de vision comparable à celui d’une chambre de prise de vues. Les scanners actuels sont généralement de type « panoramique » (voir ci-dessous).
Scanner laser à différence de phase
(en anglais “phase shift -method”) technologie utilisant la mesure de différence de phase pour mesurer la distance entre le scanner et l’objet. La télémétrie par différence de phase consiste à diriger vers l’objet le faisceau d’un laser (continu, de forte intensité et modulé de façon sinusoïdale) et à comparer les phases des ondes émises avec celle des ondes retour (Baltsavias, 1999). Les scanners laser employant ce principe modulent leur signal en utilisant une modulation sinusoïdale basée généralement sur l’amplitude ou sur la fréquence (Lerma Garcia et al., 2008).
Scanner laser à impulsions
(en anglais “pulse based method”)
Technologie utilisant la mesure du temps de parcours d’un rayon laser entre le scanner et le point d’impact sur l’objet visé pour en déduire la distance qui sépare le scanner de l’objet. Les scanners laser à impulsions sont, dans le langage courant, également nommés scanners lasers “à temps de vol”. Cette
expression n’est pas conseillée, le terme de “vol” étant inadaptéà la qualification du déplacement d’une onde dans un milieu.
Scanner laser à triangulation
Technologie utilisant le principe de la résolution de triangle, d’où son appellation, pour déterminer la distance séparant le scanner de l’objet. Elle est adaptée pour numériser des objets à courte portée, donc des objets de petite taille généralement. La technique repose sur l’observation d’un point émis par une diode laser, à l’aide d’un système optique récepteur, décalé par rapport à l’émetteur d’une distance fixe (Maillet, 1984).
Scanner laser à triangulation
Technologie utilisant le principe de la résolution de triangle, d’où son appellation, pour
déterminer la distance séparant le scanner de l’objet. Elle est adaptée pour numériser des objets à courte portée, donc des objets de petite taille généralement. La technique repose sur l’observation d’un point émis par une diode laser, à l’aide d’un système optique récepteur, décalé par rapport à l’émetteur
Scanner panoramique
(en anglais “panoramic scanner”)
Scanner effectuant des mesures de distances et d’angles dans un champ de vision de 360° dans le plan horizontal et d’au moins 2×130° dans le plan vertical. Cette caractéristique lui donne la possibilité de lever l’environnement direct englobant la station, excepté la partie située directement en dessous de
l’appareil.
Scanner panoramique à champ vertical limité
(en anglais “hybrid scanner”)
Scanner effectuant un balayage grâce à la rotation illimitée du scanner autour de l’axe vertical de
l’instrument. Le champ de vision dans le plan vertical est limité à 50° ou 60°. Ce genre de scanners est communément utilisé pour scanner à longue ou à moyenne portée de l’objet.
Spot laser
anglicisme employé pour désigner la taille de l’empreinte laser à la surface de l’objet.
Systèmes à (mesure de) temps de vol (“time-offlight”)
Se dit des systèmes s’appuyant sur la mesure du temps que met l’onde pour effectuer le trajet aller-retour système-objet pour en déduire la distance système objet. Les scanners à impulsions tout comme les scanners à différence de phase entrent dans cette catégorie.
Références
Support de cours LANDES, T. 2017. Cours de lasergrammétrie, 4e année ingénieurs; Spécialité topographie, INSA Strasbourg,
LANDES, T., GRUSSENMEYER, P. (2011). Les principes fondamentaux de la lasergrammétrie terrestre!: systèmes et caractéristiques (partie 1/2).
Revue XYZ de l’Association Française de Topographie (AFT), n°128, p.37-49.
LANDES, T., GRUSSENMEYER, P., BOULAASSAL, H. (2011). Les principes fondamentaux de la lasergrammétrie terrestre!: acquisition, traitement des données et applications (partie 2/2). Revue XYZ de l’Association Française de Topographie (AFT), n°129, p.25-38.
GRUSSENMEYER, P., LANDES, T., DONEUS, M., LERMA, J.-L. (2016). Basics of range-based modelling techniques in Cultural Heritage (Chapter pp.305-368). In!: 3D Recording, Documentation and Management of Cultural Heritage, Publisher: Whittles Publishing, Editors: EfstratiosSTYLIANIDIS,
Fabio REMONDINO, 388 pages, ISBN 978-184995-168-Baltsavias, E. P., 1999b. Airborne laser scanning: basic relations and formulas. ISPRS Journal of Photogrammetry and Remote Sensing, vol. 54,pp. 199 R 214.
Boehler, W., Bordas Vicent, M., Marbs, A., 2003. Investigating Laser Scanner Accuracy, CIPA International archives for Documentation of Cultural Heritage, Antalya (Turkey), Vol XIX!: 696-701.
LERMA Garcia, J. L., Van Genechten, B., Heine, E., Quintero, M. S., 2008. 3D RiskMapping – Theory and practice on Terrestrial Laser Scanning. Editor:Universidad Politecnica De Valencia, ISBN:978-84-8363-312-0, 261 p.
PFEIFER, N., MANDLBURGER, G., GLIRA, P., RONCAT, A., MUECKE, W.,ZLINSZKY, A., 2015. Lidar: Exploiting the Versatility of a Measurement Principle in Photogrammetry. Photogrammetric Week’15. Ed. Dieter
Fritsch. Wichmann/VDE Verlag, Belin&Offenbach, 2015, pp. 105-118 Soudarissanane, S., van Ree, J., Bucksch, A. et Lindenbergh, R., 2007.
Error budget of terrestrial laser scanning: in#uence of the incidence angle on the scan quality. Proceedings 3D-NordOst, 10. Anwendungsbezogener Workshop zur Erfassung, Modellierung, Verarbeitung, und Auswertung von 3D-Daten, 6-7 décembre 2007, Berlin, Allemagne, 8 pages.